 Научные и курсовые работы |
Главная
Исторические личности
Военная кафедра
Ботаника и сельское хозяйство
Бухгалтерский учет и аудит
Валютные отношения
Ветеринария
География
Геодезия
Геология
Геополитика
Государство и право
Гражданское право и процесс
Естествознанию
Журналистика
Зарубежная литература
Зоология
Инвестиции
Информатика
История техники
Кибернетика
Коммуникация и связь
Косметология
Кредитование
Криминалистика
Криминология
Кулинария
Культурология
Логика
Логистика
Маркетинг
Наука и техника Карта сайта
Курсовая работа: Перетворювач індуктивність-напруга
Курсовая работа: Перетворювач індуктивність-напруга
Міністерство освіти і науки України
Вінницькій національний технічний університет
Інститут автоматики електроніки та комп’ютерних систем управління
Факультет автоматики і комп’ютерних систем управління
Кафедра метрології і промислової автоматики
Пояснювальна записка
з дисципліни «Основи електроніки»
ПЕРЕТВОРЮВАЧ ІНДУКТИВНІСТЬ-НАПРУГА
до курсового проекту за спеціальністю
6.097302 “Метрологія та вимірювальна техніка”
08 – 03.КП.017.00.000ПЗ
Керівник курсового проекту
к.т.н., доцент. Дрючин О.О.
_________________________
”___” ____________200_ р.
Розробила студент гр. 1АМ-05
_________Побережна І.Л.
”___” ____________200_ р.
Вінниця ВНТУ 2007
Зміст
Вступ
1 Розробка технічного завдання
2 Розробка структурної схеми
2.1 Аналіз існуючих методів вимірювання індуктивності
2.2 Розробка структурної схеми перетворювача
2.3 Попередній розрахунок АМВ
2.4 Попередній розрахунок первинного перетворювача
2.5 Попередній розрахунок підсилювача потужності
2.6 Попередній розрахунок підсилювача напруги
2.7 Розробка детальної структури схеми
3 Електричні розрахунки
3.1 Електричний розрахунок підсилювача потужності
3.2 Розрахунок підсилювача напруги
3.3 Розрахунок підсилювача на ОП
3.4 Електричний розрахунок первинного перетворювача
3.5 Електричний розрахунок перетворювача
3.6 Визначення похибки
4 Моделювання одного з вузлів
Висновки
Список літератури
Додаток А (обов’язковий) Перетворювач індуктивність – напруга. Технічне завдання
Додаток Б (обов’язковий) Перетворювач індуктивність – напруга. Схема електрична принципова
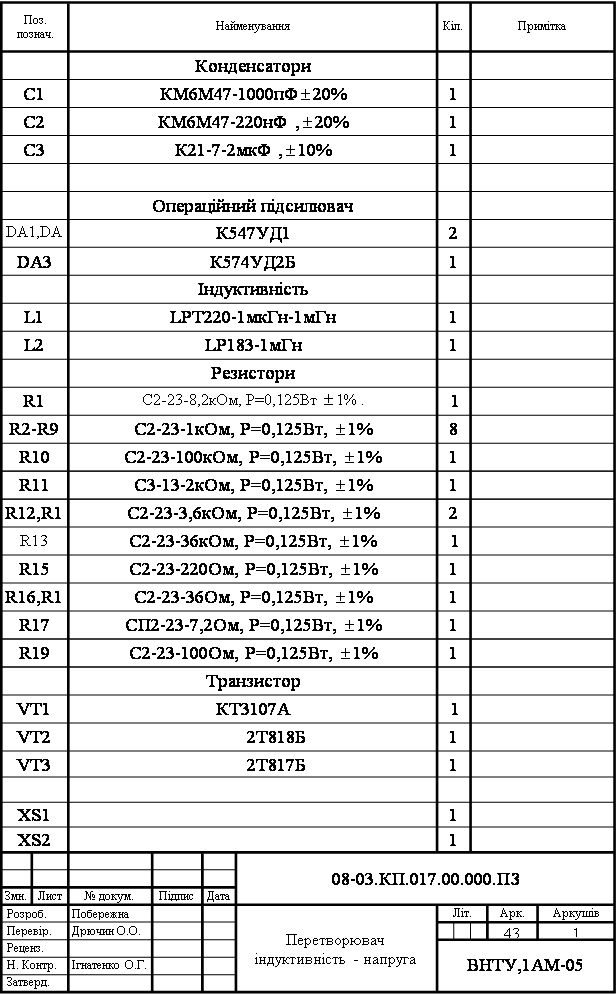
Додаток В(обов’язковий) Перетворювач індуктивність – напруга. Перелік елементів
Анотація
У даному курсовому проекті було розроблено та реалізовано перетворювач індуктивності в напругу. Цей перетворювач здатен перетворювати індуктивність у межах 1мкГн...1мГн у напругу від 0 до 30В. Максимальна напруга вихідного сигналу не перевищує 30В на опорі 5Ом. Перетворювач забезпечує високу точність, тобто похибка складає менше 1%.
Вступ
Останні десятиліття обумовлені широким впровадженням у галузі народного господарства засобів мікроелектроніки й обчислюваної техніки, обмін інформацією з якими забезпечується лінійними аналоговими і цифровими перетворювачами(АЦП і ЦАП).
Сучасний етап характеризується великими та дуже великими інтегральними схемами ЦАП і АЦП, що володіють високими експлуатаційними параметрами: швидкодією, малими похибками, багатозарядністю. Включення БІС єдиним, функціонально закінченим блоком сильно спростило впровадження їх у прилади та установки, що використовуються як у наукових дослідженнях, так і в промисловості і дало можливість швидкого обміну інформацією між аналоговими та цифровими пристроями.
Техніка конструювання і застосування датчиків, або , як її можна коротко назвати, сенсорника, за останні роки розвилася в самостійну галузь вимірювальної техніки. З ростом автоматизації до датчиків фізичних параметрів стали пред'являтися усе більш високі вимоги. При цьому особливе значення надається наступним показникам:
- мініатюрність (можливість вбудовування);
- дешевина (серійне виробництво);
- механічна міцність.
По структурній побудові автоматизовані пристрої нагадують такі біологічні системи, як, наприклад, людина. Органам почуттів людини відповідають в автоматах (чи роботах) датчики, а функції активних органів виконуються виконавчими пристроями. Аналогом мозку як центрального пристрою для обробки сигналів служить ЕОМ з її системою пам'яті.
Поняттям «датчик» у загальному випадку позначають дешевий, але надійний приймач і перетворювач вимірюваної величини, що володіє помірною точністю і придатний для серійного виготовлення.
Пристрої, у яких електромагнітне поле створюється прикладеною напругою, складають групу індуктивних перетворювачів. Основним елементом у цих перетворювачах є змінна індуктивність, що змінюється вхідним вимірювальним параметром.
При застосуванні індуктивного перетворювача інформативним параметром є його індуктивність Lх.
Як вимірювальні ланцюги в індуктивних перетворювачах застосовуються дільники напруги, мостові схеми, коливальні контури й автогенератори. Оскільки сигнали, що знімаються з індуктивних перетворювачів, малі, то вимірювальні ланцюги містять підсилювачі.
1 Розробка технічного завдання
Метою курсового проекту є розрахунок та визначення технічних параметрів схеми перетворювача індуктивність-напруга. Заданий діапазон індуктивностей складає від 1мкГн до 1мГн, значення максимальної вихідної напруги дорівнює 30В, значення опору навантаження складає 5 Ом. Необхідно розрахувати значення кожного з елементів схеми перетворювача індуктивність-напруга та згідно розрахункам вибрати необхідні операційні підсилювачі, транзистори та діоди.
При проектуванні індуктивних перетворювачів варто звертати увагу на екранування проводів, вибір ізоляції, усунення поверхневого опору ізоляції і вибір частоти живлення. Чим вище ця частота, тим менше вихідний опір, тому нерідко частоту живлення вибирають велику (до декількох МГц).
Конструктивні схеми індуктивних перетворювачів виконуються в різних варіантах у залежності від області застосування.
Можливі області застосування індуктивних перетворювачів надзвичайно різноманітні, можна виділити лише окремі сфери:
- промислова техніка виміру і регулювання;
- робототехніка;
- автомобілебудування;
- побутова техніка;
- медична техніка.
Застосування того чи іншого датчика в цих сферах визначається
насамперед відношенням ефективність. При промисловому застосуванні визначальним фактором є погрішність, що при регулюванні процесів повинна складати < 1%, а для задач контролю - 2...3%. Для спеціальних застосувань в області робототехніки і медичної техніки ціни датчиків можуть досягати навіть рівня 10...100 тис. Завдяки впровадженню нових технологій виготовлення (високо-вакуумне напилювання, розпилення, хімічне осадження з газової фази, фотолітографія і т.д.) і нових матеріалів безупинно розширюються сфери застосування датчиків, недоступні раніше через їхню високу ціну.
Прилад повинний відтворювати вимірювані величини з погрішностями, що допускаються. При цьому слово «відтворення», еквівалентне в даному трактуванні слову «відображення», розуміється в самому широкому змісті: одержання на виході приладу величин, пропорційних вхідним величинам; формування заданих функцій від вхідних величин (квадратична і логарифмічна шкали й ін.); одержання похідних і інтегралів від вхідних величин; формування на виході слухових чи зорових образів, що відображають властивості вхідної інформації; формування керуючих сигналів, використовуваних для керування контролю; запам'ятовування і реєстрація вихідних сигналів.
Вимірювальний сигнал, одержуваний від контрольованого об'єкта, передається у вимірювальний прилад у виді імпульсу або у виді енергії. Можна говорити про сигнали: первинних - безпосередньо характеризують контрольований процес; сприйманих чуттєвим елементом приладу; поданих у вимірюльну схему, і т.д. При передачі інформації від контрольованого об'єкта до покажчика приладу сигнали перетерплюють ряд змін за рівнем і спектром і перетворяться з одного виду енергії в іншій.
Необхідність такого перетворення викликається тим, що первинні сигнали не завжди зручні для передачі, переробки, подальшого перетворення
і відтворення. Наприклад, при вимірі температури приладом, чуттєвий елемент якого міститься в контрольоване середовище, сприйманий потік тепла важко передати, а тим більше відтворити на покажчику приладу. Цією особливістю володіють майже всі сигнали первинної інформації. Тому сприймані чуттєвими елементами сигнали майже завжди перетворяться в електричні сигнали, що є універсальними.
Та частина приладу, у якій первинний сигнал перетвориться, наприклад, в електричний, називається первинним перетворювачем. Часто цей перетворювач сполучається з чуттєвим елементом. Сигнали з виходу первинного перетворювача надходять на наступні перетворювачі вимірювального приладу.
У схемах з датчиками, включеними в системи, що стежать, з датчика знімається лише сигнал неузгодженості, що стає рівним нулю в сталому стані системи, що стежить.
Основним недоліком цих схем є залежність значення вихідної величини від параметрів джерела живлення датчика, підсилювача й інших елементів схеми, а також від зовнішніх умов. Справді, варто змінитися напрузі чи частоті генератора, що живить датчик, як напруга, частота і фаза, що є вихідними величинами і, що знімаються з опору R, також зміняться.
Від цих недоліків вільні схеми з індуктивними датчиками, включеними в замкнуту систему автоматичного регулювання. У цих схемах вихідною величиною є кут повороту осі двигуна, що відпрацьовує, чи іншої осі, зв'язаної з нею через редуктор. Однієї з основних характеристик такої системи є чутливість, що показує, при якім мінімальному відхиленні чуттєвого елемента система відпрацьовування приходить у дію. Зовнішні фактори - напруга живлення, температура навколишнього середовища і т.п. - впливають лише на чутливість системи; на точність системи вони можуть впливати лише в тій мірі, у якій вона зв'язана з чутливістю.
У
найпростішому випадку індуктивний датчик являє собою дві послідовно включені
індуктивності, побудовані конструктивно таким чином, що при збільшенні однієї з
них інша зменшується. Ці дві індуктивності можуть бути включені в мостову
схему, де два інших плечі - реостатні. Якщо при цьому напруга, що знімається з
діагоналі моста, використовувати як сигнал для системи, що стежить, що
переміщає щітку потенціометра R убік зменшення неузгодженості, то завжди в
сталому стані системи, що стежить, це ![]() напруга
u=0.
напруга
u=0.
Згідно ДСТУ 2681-94 „Метрологія. Терміни та визначення” та ДСТУ 2682-94 „ Метрологія. Метрологічне забезпечення ” даний розроблений перетворювач індуктивність - напруга відноситься до первинних вимірювальних перетворювачів
2 Розробка структурної схеми
2.1 Аналіз існуючи методів вимірювання індуктивності
Індуктивність — фізична величина, яка характеризує магнітні властивості електричного ланцюга.
Якщо в провідному контурі тече струм, струм створює магнітне поле. Величина магнітного потока, пронизуючий контур, зв'язана з величиною струму І в такий спосіб:
Φ = LI (1)
Коефіцієнт пропорційності L саме і називається індуктивністю (або, строго говорячи, коефіцієнтом самоіндукції контуру). Індуктивність залежить від розмірів і форми контуру, а також від магнітної проникливості навколишнього середовища.
У системі одиниць СИ індуктивність виміряється в Генрі, у системі СГС у сантиметрах (1 Гн = 109 див)
Через індуктивність виражається ЕРС самоіндукції у контурі, що виникає при зміні в ньому струму:
![]() . (2)
. (2)
При заданій силі струму індуктивність визначає енергію магнітного поля струму:
![]() (3)
(3)
Практично ділянки ланцюга зі значною індуктивністю виконують у виді котушок індуктивності.
Індуктивність L - величина, рівна відношенню потокощеплення, зв'язаного з контуром, до сили струму, що протікає по ньому:
![]()
Індуктивність складається з внутрішньої індуктивності (жили кабелю і проводу) L в і зовнішньої, міжвіткової, індуктивності L і
![]()
Одиниця індуктивності генрі (гн) - індуктивність контуру, з яким зчеплений магнітний потік 1 вб, коли по контурі тече струм 1 а, або індуктивність контуру, у якому виникає е.д. с. самоіндукції 1 у при зміні струму в ньому на 1 а в 1 сек.
У якості перетворювача індуктивності у напругу використаємо мостову схему.
Серед мостових схем найчастіше використовується міст Уітстона, схема якого подана на рисунку 1. Міст містить чотири опори Z1, Z2, Z3 і Z4. Точки a, b, c, d називаються вершинами моста. Електричне коло між двома суміжними вершинами називається плачем моста, а між двома протилежними – його діагоналлю.
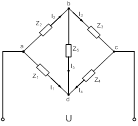
Рисунок 1 - Принципова схема чотириплечого моста Уітстона
Індуктивність можна вимірювати за допомогою мостів різного типу. На рисунку 2, подано одну з таких схем. Вважаємо, що індуктивність має деякий активний опір (опір втрат). Міст зрівноважується за допомогою змінної зразкової індуктивності L3 і зразкового резистора R3 . Умова рівноваги цього моста
![]() ,
(6)
,
(6)
Звідки
![]() (7)
(7)
Може бути запропонована й інша схема моста, в якій змінне плече має зразкову ємність, ввімкнену паралельно із зразковим резистором.
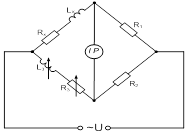
![]() Рисунок 2 - Схема моста для
вимірювання індуктивності
Рисунок 2 - Схема моста для
вимірювання індуктивності
Оскільки на міст необхідно подати напругу, то для її генерації використаємо імпульсний генератор.
Імпульсні генератори – призначені для одержання сигналів, форма яких суттєво відрізняється від синусоїдальної. Такі сигнали характеризуються наявністю ділянок з відносно повільною зміною амплітуди і її стрибковою зміною. Імпульсні генератори мають внутрішній або зовнішній позитивний зворотній зв’язок.
Особливість роботи активних елементів: вони періодично, дуже швидко змінюють свій стан з одного крайнього положення в інше.
Основні режими імпульсних генераторів:
- автоколивальний – після збудження генерується послідовність імпульсів, характеристики яких визначаються лише параметрами елементів схеми;
- очікування – генератори імпульсів відбуваються лише за наявності зовнішнього сигналу запуску;
- синхронізації – частота вихідних імпульсів рівна чи кратна частоті зовнішнього синхронізуючого сигналу.
Формувачі імпульсів – пристрої, які виробляють імпульси необхідної тривалості з інших імпульсів чи з перепаду напруг (фронта).
Формувачі імпульсів бувають:
- на логічних елементах;
- з інтегруючим ланцюгом;
- з емітер ним повторювачем;
- на мікросхемах.
Емітерний повторювач (рисунок 3) має найбільший вхідний опір і найменшого вихідне і використовується для посилення сигналу по струму, коефіцієнт підсилення по напрузі близький до одиниці. Однак це справедливо при досить низькому опорі джерела сигналу і на низькій частоті.
При нескінченно великому опорі джерела сигналу перестає діяти 100% послідовна ООС по напрузі і вихідний опір прагнути до Rвих каскаду з загальним емітером, різко зростає коефіцієнт гармонік, що мінімальний при Rr=0.
Rвх=Rб+(1+h21е)Rн (8)
Rвих=Rе+(Rr+Rб)/(1+h21э) (9)
де Rб - опір бази (1...20 Ом і більш);
h21э - коефіцієнт передачі струму;
Rэ=Fт/Iк(ма);
Fт=25мв - температурний потенціал;
Rr - вихідний опір джерела сигналу.
На рисунку 3 зображено емітерний повторювач
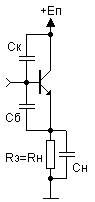
Рисунок 3 - Емітерний повторювач
Вхідний опір різко зменшується у випадку коротких імпульсів і на високих частотах. На високих частотах вхідна ємність повторювача залежить, головним чином, від Сн і грубо може бути оцінена як Сн/h21е. Вихідний опір повторювача на високих частотах може мати індуктивний характер, тому при визначенні Сн емітерний повторювачі можуть давати коливальні перехідні процеси і навіть переходити в режим автогенерації.
Однак найбільш небезпечним наслідком ємнісного навантаження є схильність однотактних повторювачів до нелінійних перекручувань сигналу високої частоти.
На рисунку 4 - емітерний повторювач з підвищеною швидкодією.
Реалізований за рахунок швидкодіючого лінійного позитивного зворотного зв'язку за допомогою транзисторів VT1-VT3.
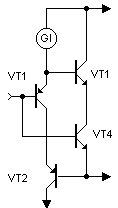
Рисунок 4 - Емітерний повторювач з підвищеною швидкодією
Завдяки відбивачеві струму на транзисторах VT1, VT3, струми колекторів, а відповідно і струми баз транзисторів VT2 і VT4 рівні. А тому що струми баз протилежні, те і відбувається їхня компенсація, що еквівалентно Rвх, рівному безкінцівки.
На рисунку 5 зображений повторювач із вхідним опором, що прагне до нескінченності.
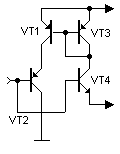
Рисунок 5 - Повторювач із вхідним опором, що прагне до нескінченності
На рисунку 6 зображений повторювач зі збільшеним вхідним опором, на якому Rвх практично не залежить від h21е.
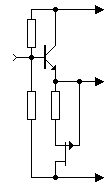
Рисунок 6 - Повторювач зі збільшеним вхідним опором
2.2 Розробка структурної схеми перетворювача
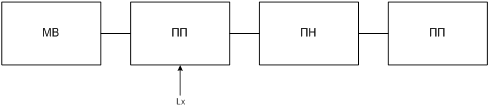
Рисунок 7 – Спрощена структурна схема
На рисунку 7- спрощена структурна схема,на якій :
МВ – мультивібратор, використовується для того, щоб сформувати імпульси вхідного сигналу з певною частотою. Межі частоти не зазначені в умові, тому задамося частотою f=100кГц.
ПП – первинний перетворювач, призначений для перетворення індуктивності у напругу за допомогою мостової схеми та схеми віднімання на основі ОП.
ПН – підсилювач напруги, призначений для підсилення величини вихідного сигналу по напрузі до заданого в умові. Можна використати підсилювач на БТ.
ПП – підсилювач потужності, використовується для забезпечення потужності на навантаженні. Використаємо комплементарний емітер ний повторював.
2.3 Попередній розрахунок АМВ
Даний каскад використовується для генерування імпульсів зі сталою напругою і частотою. Особливих вимог до даного генератора не висувається.
Для зручності оберемо частоту 100кГц та напругу на виході 5В.
Напруга на виході генератора
не повинна бути висока для зменшення похибки. Нехай Uвих=5В,
тоді ![]() =(1,2...1,4)
Uвих =(6..7)В
=(1,2...1,4)
Uвих =(6..7)В
Задамося ![]() =
=![]() В.
В.
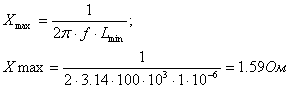
Гранична частота на виході ОП має бути досить висока.
Визначимо напругу живлення за заданою амплітудою вихідних імпульсів:
![]()
![]()
![]()
Виберемо ОП К547УД1
Основні параметри:
![]() нА
вхідний струм
нА
вхідний струм
![]() В максимальна
вихідна напруга
В максимальна
вихідна напруга
![]() Ом вихідний
опір
Ом вихідний
опір
![]() МГц гранична частота
МГц гранична частота
Діапазон робочих
температур=(45-70)![]() С
С
2.4 Попередній розрахунок первинного перетворювача
Визначимо діапазон зміни індуктивності :
D=![]() ;
(10)
;
(10)
D=![]() =1000
=1000
Таким чином виникає потреба розбити на під діапазони діапазон зміни індуктивності.
D1=![]() ;
(11)
;
(11)
D1=![]() =32
=32
D2=![]() ;
(12)
;
(12)
D2=![]() =32
=32
Виконавши зрівноваження моста для Lmax визначимо номінали елементів.
Проведемо розрахунок опору індуктвності:
 (13)
(13)
 (14)
(14)
Таким чином для того щоб на виході перетворювача напруга була завжди додатня необхідно і достатньо щоб L2=L1max.
Задамося R5 = R6 =1кОм
Напруга на виході перетворювача розаховується наступним чином:
 (15)
(15)
Оскільки міст для
максимального значення ємності зрівноважений, то ![]() В.
В.
Суматор виконано на основі ОП, саме тому необхідно провести вибір ОП. Таким чином для операційного підсилювача:
![]()
![]()
![]()
Виберемо ОП К547УД1
Основні параметри:
![]() нА вхідний струм
нА вхідний струм
![]() В максимальна вихідна
напруга
В максимальна вихідна
напруга
![]() Ом вихідний опір
Ом вихідний опір
![]() МГц гранична частота
МГц гранична частота
Діапазон робочих температур=(45-70)![]() С
С
2.5 Попередній розрахунок підсилювача потужності
В якості підсилювача потужності використаємо підсилювальний каскад такий, як комплементарний емітерний повторювач.
Розрахуємо потужність на виході даного каскаду.
Початкові дані:
![]() 30В, Rн=5 Ом
30В, Rн=5 Ом
Іmax =![]() (16)
(16)
Іmax = ![]()
Розрахуємо максимальну вихідну потужність:
Рmax=Umax Imax; (17)
Рmax =30 6=180 (Вт)
Оскільки використовуємо комплементарне включення то потужність на виході одного транзистора зменшується у двічі. Таким чином для транзистора:
Рmax=Umax Imax/ 2 (18)
Рmax =90 (Вт)
За даними параметрами з довідника оберемо транзистор 2Т818Б типу NPN.
Основні параметри транзистора:
| Тип |
Pкmax,Вт |
Ікmax, A |
Uкеmax, B |
h21e min/max |
fгр, МГц |
Uеб0max, В |
Кп р, дб |
| 2Т818Б | 100 | 15 | 60 | 20 | 3 | 5 | 25 |
2.6 Попередній розрахунок підсилювача напруги
У якості підсилювача напруги використаємо підсилювальний каскад за схемою зі спільним емітером на основі біполярного транзистора.
Розрахуємо коефіцієнт підсилення за напругою:
 (19)
(19)
Це є досить велике підсилення і тому проведемо попереднє підсилення у 100 разів за допомогою підсилювача на ОП.
Проведемо вибір ОП.
Оскільки підсилення виконуємо до величини 7,8В, то
![]()
![]()
Виберемо ОП К574УД2Б
Основні параметри:
![]() нА вхідний струм
нА вхідний струм
![]() В максимальна вихідна
напруга
В максимальна вихідна
напруга
![]() Ом вихідний опір
Ом вихідний опір
![]() МГц гранична частота
МГц гранична частота
Діапазон робочих
температур=(45-70)![]() С
С
Оскільки частота вихідного
сигналу 100 кГц, то гранична частота транзистора ![]() .
.
Оскільки підсилення, що виконує ПП по потужності КU p min=25дб=300, то максимальна потужність що розсіюється на колекторі транзистора не повинна бути меншою за Рк
Оскільки
Кпр=25дб=300,
то Рвх=![]() ; (20)
; (20)
Рвх= ![]()
Рк=РПП (21)
Рк =300мВт.
Ікмах =![]()
КТ3107А – ![]() =45В
=45В
![]() =100мА
=100мА
![]() =300мВт
=300мВт
![]() =12Пф
=12Пф
2.7 Розробка детальної структури схеми

Рисунок 8 – Детальна структурна схема
На рисунку 8 – детальна структурна схема, в якій:
АМВ – автоколивальний мультивібратор, використовується для того, щоб сформувати імпульси з напругою 5В та частотою 100кГц. Оснований на К547УД1- живленні моста.
ПП – первинний перетворювач, призначений для перетворення індуктивності у напругу. Схема віднімання основана на ОП К547УД1. Межі вихідної напруги 0...78мВ.
ПН – підсилювач напруги, призначений для підсилення величини вихідного сигналу по напрузі до 30В. Таким чином на виході даного каскаду отримуємо напругу 0...30В. Оскільки у процесі розрахунків було розраховано, що коефіцієнт підсилення даного каскаду є досить високим, то було прийняте рішення додати каскад підсилення напруг на ОП, який би здійснював попереднє підсилення вихідного сигналу у 10 разів і розмістити його перед каскадом на БТ. У якості ОП використано ОП К574УД2Б Підсилювач на БТ оснований на БТ КТ3107А.
ПП – підсилювач потужності, використовується для забезпечення потужності на навантаженні. Оснований на БТ 2Т818Б, 2Т817Б.
Закінчивши попередню розробку структурної схеми, маємо схему, розбиту на декілька каскадів, внаслідок чого, для кожного з каскадів зроблений попередній розрахунок. Тобто визначені динамічні діапазони, коефіцієнти підсилення, максимальні значення струмів, напруг, потужностей, вибрані згідно розрахункам операційні підсилювачі, транзистори.
Принцип роботи перетворювача заключається у наступному. АМВ проводить генерацію імпульсів з напругою 5В та частотою 100кГц. Згенеровані імпульси потрапляють на міст, який зрівноважений для максимального значення індуктивності і у такому стані на виході підсилювача отримуємо напругу таку маленьку, що умовно визначаємо її як нульову. Коли змінна індуктивність змінює своє значення міс виходить з рівноваги у на виході перетворювача отримуємо напругу, що є різницею напруг на різних вузлах моста. Дана напруга є досить низькою і виникає необхідність її підсилення по напрузі та стабілізації та підсилення по потужності, саме тому у схемі і використовуємо підсилювачі напруги та потужності.
3 Електричні розрахунки
3.1 Електричний розрахунок підсилювача потужності
Електричний розрахунок виконуємо за допомогою електричної принципової схеми , яка зображена на рисунку 9.
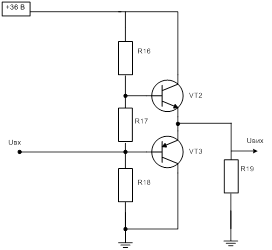
Рисунок 9 – Схема ПП електрична принципова
Вхідні дані:
Транзистори 2Т818Б, 2Т817Б.
![]() =100Вт
=100Вт
![]() =15А
=15А
![]() =60В
=60В
Uмах =30 В
Рвх=300мВт
Рвих=180Вт
Оберемо напругу живлення
![]()
Задаємося ![]()
З вихідних характеристик транзисторів:
![]()
![]() при
при ![]()
З вхідних характеристик:
![]() при
при ![]() та
та ![]()
Задамося ![]()
![]()
![]() тому
тому ![]()
![]()
Проведемо розрахунок опорів вхідного подільника R18 R16
 (22)
(22)
 (23)
(23)
Оберемо стандартні опори:
R18 С2-23-36Ом,
Р=0,125Вт, ![]() 1%
1%
R16 С2-23-36Ом, Р=0,125Вт, ![]() 1%
1%
 (24)
(24)
R17 С2-23-7,2Ом,
Р=0,125Вт, ![]() 1%
1%
R17 має невелике значення і переважно при змінному струмі вважають бази обох транзисторів з’єднаними.
Розрахуємо вхідний опір цього каскаду:
 (25)
(25)
![]() Ом – додатковий опір.
Ом – додатковий опір.
R19 С2-23-100Ом,
Р=0,125Вт, ![]() 1%
1%
3.2 Розрахунок підсилювача напруги
На рисунку 10 зображена схема ПН електрична принципова.
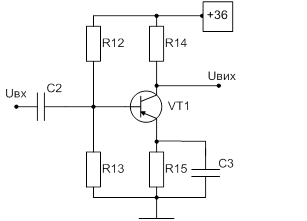
Рисунок 10 – Схема ПН електрична принципова
Вхідні дані:
Транзистор КТ3107А
![]() =300мВт
=300мВт
![]() =100мА
=100мА
![]() =45В
=45В
Оберемо напругу живлення
![]()
Задаємося ![]() .
.
Обираємо з вихідної характеристики транзистора:
![]()
![]() при
при ![]()
З вхідних характеристик:
![]() при
при ![]()
Задамося ![]()
Розрахуємо R14 :
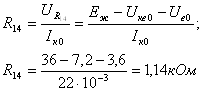 (26)
(26)
R14 С2-23-3,6кОм,
Р=0,125Вт, ![]() 1%
1%
Розрахуємо R15 :
![]()
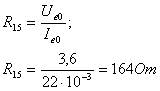 (27)
(27)
R15 С2-23-220Ом,
Р=0,125Вт, ![]() 1%
1%
![]() тому
тому ![]()
![]()
Проведемо розрахунок опорів вхідного подільника R12 R13
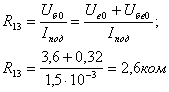 (28)
(28)
 (29)
(29)
R12 С2-23-3,6кОм,
Р=0,125Вт, ![]() 1%
1%
R13 С2-23-36кОм,
Р=0,125Вт, ![]() 1%
1%
Розрахуємо вхідний опір цього каскаду:
 (30)
(30)
Проведемо розрахунок конденсаторів.
![]() - розділові конденсатори.
- розділові конденсатори.
![]() - блокувальний конденсатор.
- блокувальний конденсатор.
![]() ;
(31)
;
(31)
![]() ;
(32)
;
(32)
 (33)
(33)
![]() К21-7-2мкФ ,
К21-7-2мкФ ,![]() 10%
10%
Аналогічно розрахуємо ![]()
 (34)
(34)
![]() КМ6М47-220нФ ,
КМ6М47-220нФ ,![]() 20%
20%
3.3 Розрахунок підсилювача на ОП
На рисунку 11 зображена схема ПН на ОП електрична принципова.
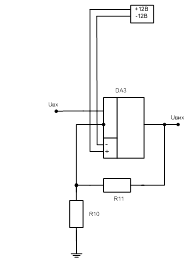
Рисунок 11 – Схема ПН на ОП електрична принципова
З попередніх розрахунків відомо, що ![]()
Для використовуваного підсилювача:
 (35)
(35)
Задамося R11 100кОм
R10=![]() кОм
кОм
R10 С2-23-100кОм, Р=0,125Вт, ![]() 1%
1%
R11 СП-3-13-2кОм, Р=0,125Вт, ![]() 1%
1%
3.4 Електричний розрахунок первинного перетворювача
Проведемо розрахунок первинного перетворювача за допомогою схеми електричної принципової первинного перетворювача (рисунок 12) .
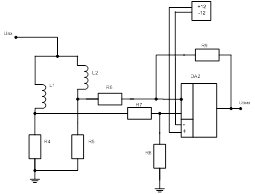
Рисунок 12 – Схема первинного перетворювача електрична принципова
Проведемо розрахунок опорів суматора, тобто ОП з диференційним входом. Такий суматор повинен виконує віднімання напруг на виході мостової схеми. Саме тому для нього вірні наступні вимоги:
R7 = R8 та R6 = R9.
Таким чином задамося опорами так:
R7 = R8 =1кОм
R6 = R9 = 1кОм.
R6 С2-23-1кОм,
Р=0,125Вт, ![]() 1%
1%
R7 С2-23-1кОм,
Р=0,125Вт, ![]() 1%
1%
R8 С2-23-1кОм,
Р=0,125Вт, ![]() 1%
1%
R9 С2-23-1кОм,
Р=0,125Вт, ![]() 1%
1%
З попередніх розрахунків відомо:
L1 =1мкГн...1мГн.
L2 =1мГн.
Оскільки для зрівноваженого моста R4 ![]() = R5
= R5 ![]() .
.
Таким чином задавшись R4 = R5 =1кОм проведено вибір усіх елементів
схеми.
R4 С2-23-1кОм,
Р=0,125Вт, ![]() 1%
1%
R5 С2-23-1кОм,
Р=0,125Вт, ![]() 1%
1%
L2 LP183-1мГн
L1 LPТ220-1мкГн-1мГн
3.5 Електричний розрахунок перетворювача
На рисунку 13 зображена схема АМВ електрична принципова.
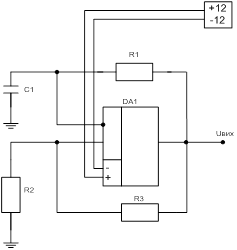
Рисунок 13 – Схема АМВ електрична принципова
Розрахуємо опір.
Вхідні данні:
Частота модуляції fmax= 100кГц
Umax=5В
Визначимо напругу живлення за заданою амплітудою вихідних імпульсів:
![]() =(1,2…1,4)
=(1,2…1,4)![]() =6…7В.
=6…7В.
Оберемо ![]() =12В.
=12В.
Оскільки частота f= 100кГц, задавшись ємністю конденсатора С1=1000пФ розрахуємо значення резистора R1:
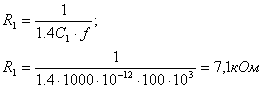 (36)
(36)
R1 С2-23-8,2
кОм, Р=0,125Вт,![]()
А також конденсатор:
С1
КМ6М47-1000пФ ,![]() 20%
20%
Проведемо розрахунок опорів R2 R3 :
Оскільки на виході операційного підсилювача необхідно
забезпечити рівень напруги 5 В, то коефіцієнт підсилення ![]() , а отже R2=R3,
то задамося:
, а отже R2=R3,
то задамося:
R3 С2-23-1кОм, Р=0,125Вт, ![]() 1%
1%
R2 С2-23-1кОм,
Р=0,125Вт, ![]() 1%
1%
3.6 Визначення похибки
Основна неточність може виникнути в зв’язку з неідеальністю ОП.
Оскільки ![]() ,
, ![]() ,
, ![]() .
.
![]() Ом,
Ом, ![]() Ом.
Ом.
R11=100кОм R10=1,01кОм
Реальний коефіцієнт підсилення реального ОП можна визначити за формулою:
 (37)
(37)
Визначимо похибку:
 .
(38)
.
(38)
Значення реальної похибки 0,3%, що не перевищує значену допустиму похибку 1%. Отже, можна зробити висновок, що розрахунок зроблений з задовільною точністю.
4 Моделювання одного з вузлів
Проведемо моделювання одного з вузлів перетворювача з метою впевнитись у його працездатності. Проведемо моделювання підсилювача напруги (рисунок 14). Підставимо всі обрані вище номінали. На вхід підсилювача подаємо імпульси прямокутної форми (рисунок 15) . Напруга вхідного сигналу складає 1мВ.
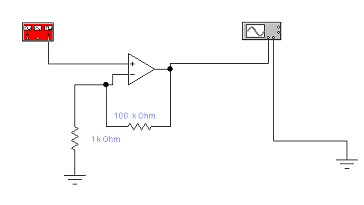
Рисунок 14 – Підсилювач напруги
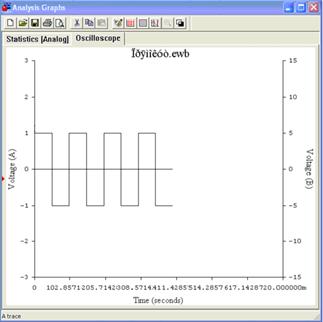
Рисунок 15 – Амплітуда вихідної напруги при К=100
Висновки
В курсовому проекті докладно були описані головна мета, основне призначення та області застосування перетворювача індуктивність-напруга. Також була розглянута поетапна розробка та розрахунок кожного з елементів схеми, приведені структурні схеми окремих каскадів, моделювання одного з вузлів та визначено значення похибки.
Нещодавно конструктори відносилися з упередженням до індуктивних датчиків, вважаючи, що схеми з індуктивними датчиками не забезпечують ні достатньої точності, ні стабільності роботи приладів. Вважалося обов'язковим для одержання стійкого сигналу на виході індуктивного датчика подавати на нього напругою високої частоти, що досягає сотень кілогерц, а іноді навіть десятків мегагерц. Наявність такої високої частоти у свою чергу приводило до втрат у паразитних індуктивностях, сполучних проводах і т.п. Для того щоб підвищити амплітуду сигналу, що знімається з індуктивного датчика, і поліпшити стабільність показань, деякі автори розробок застосовували в першому каскаді підсилювача електрометричні лампи, що допускають включення сотень мегом у ланцюг керуючої сітки і т.д., однак усі ці міри мало поліпшували стабільність систем з індуктивними датчиками й у той же час значно ускладнювали конструкцію приладів.
Проведені в даний час роботи показали, що причина нестабільності роботи систем з індуктивними датчиками лежить у неправильному підході конструкторів до проектування датчиків, зокрема, у неправильному розташуванні ізолюючих елементів конструкції, нестабільність властивостей яких і приводить до помилок у роботі систем. Ці труднощі виявилися переборними, і вже створені прилади з індуктивними датчиками, що забезпечують високі точності і стабільність роботи, що витримують важкі режими експлуатації. В даний час установлено, що індуктивні датчики володіють цілим колом переваг у порівнянні з іншими датчиками. До їхніх достоїнств відносяться:
- необхідність дуже малих зусиль для переміщення рухливої частини;
-мале споживання енергії;
-простота виготовлення;
-використання дешевих матеріалів;
-висока точність і стабільність роботи систем з індуктивними датчиками;
-можливість широкого регулювання приладів з деякими типами індуктивних датчиків.
До недоліків індуктивних перетворювачів варто віднести залежність точності від температури, високі вимоги до опору кріпильних ізолюючих деталей і необхідність роботи на підвищеній (у порівнянні з 50 гц) частоті. Однак у більшості випадків кріплення індуктивних датчиків можуть бути виконані і зі звичайних матеріалів, а практика показує, що індуктивні датчики дають гарні результати.
Цінні якості індуктивних перетворювачів - мала величина механічного зусилля, необхідного для переміщення його ротора, можливість регулювання виходу системи, що стежить, і висока точність роботи - роблять індуктивні перетворювачі незамінними в приладах, у яких допускаються погрішності лише в соті і навіть тисячні частки відсотка, а тому необхідно індуктивні перетворювачі розвивати й освоювати.